Sealing
- IP67 cable glands as needed.
- EPDM / silicone gasket material.
- Panel-mount USB bulkheads as needed.
- SMA bulkhead connector for LoRa antenna pass-through.
Bill of materials
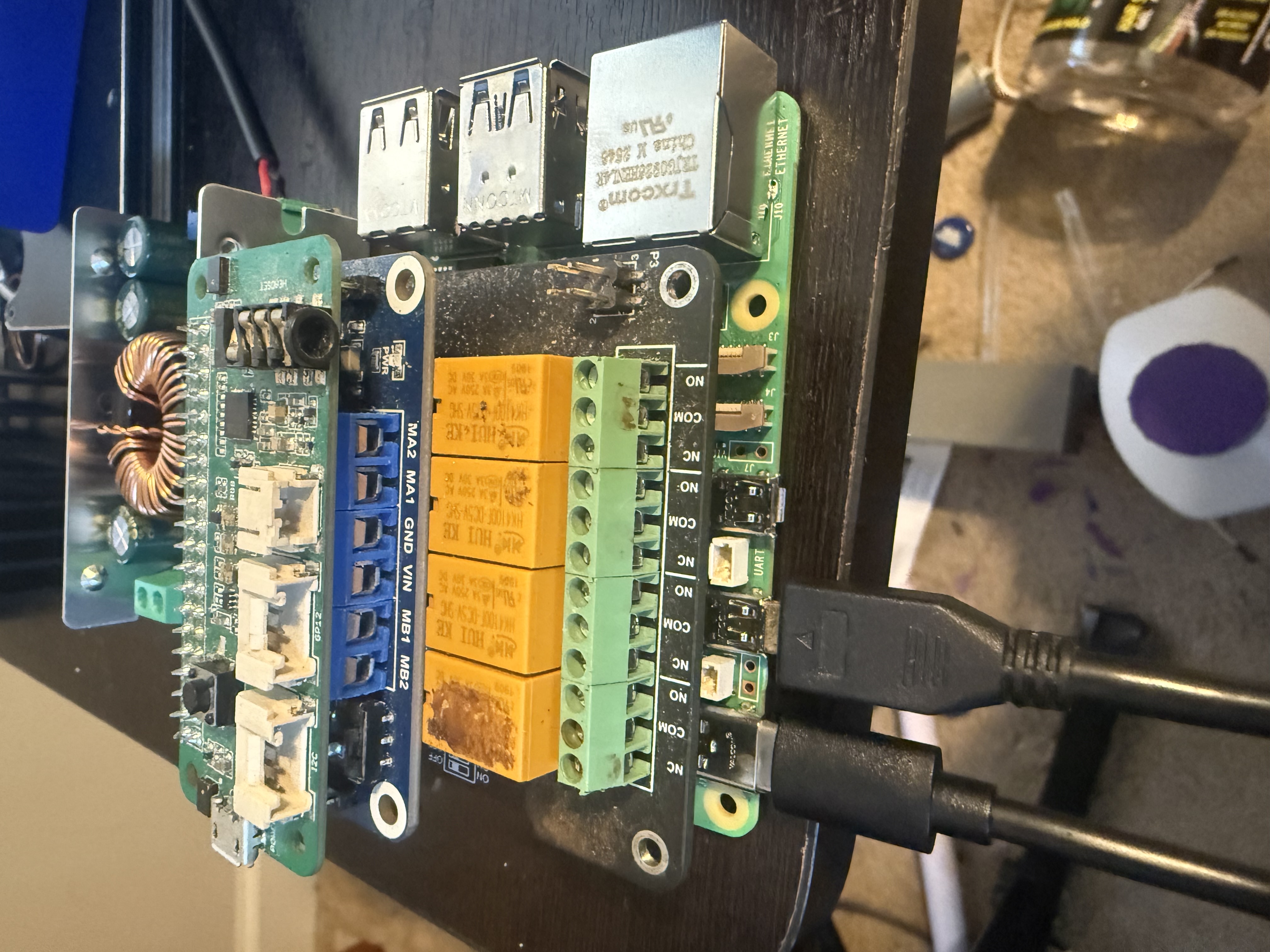
Hardware, electronics, printed parts, and sealing-upgrade materials for the current K2Aley GAR-BOT build. This page keeps the visible website BOM aligned with the package files.

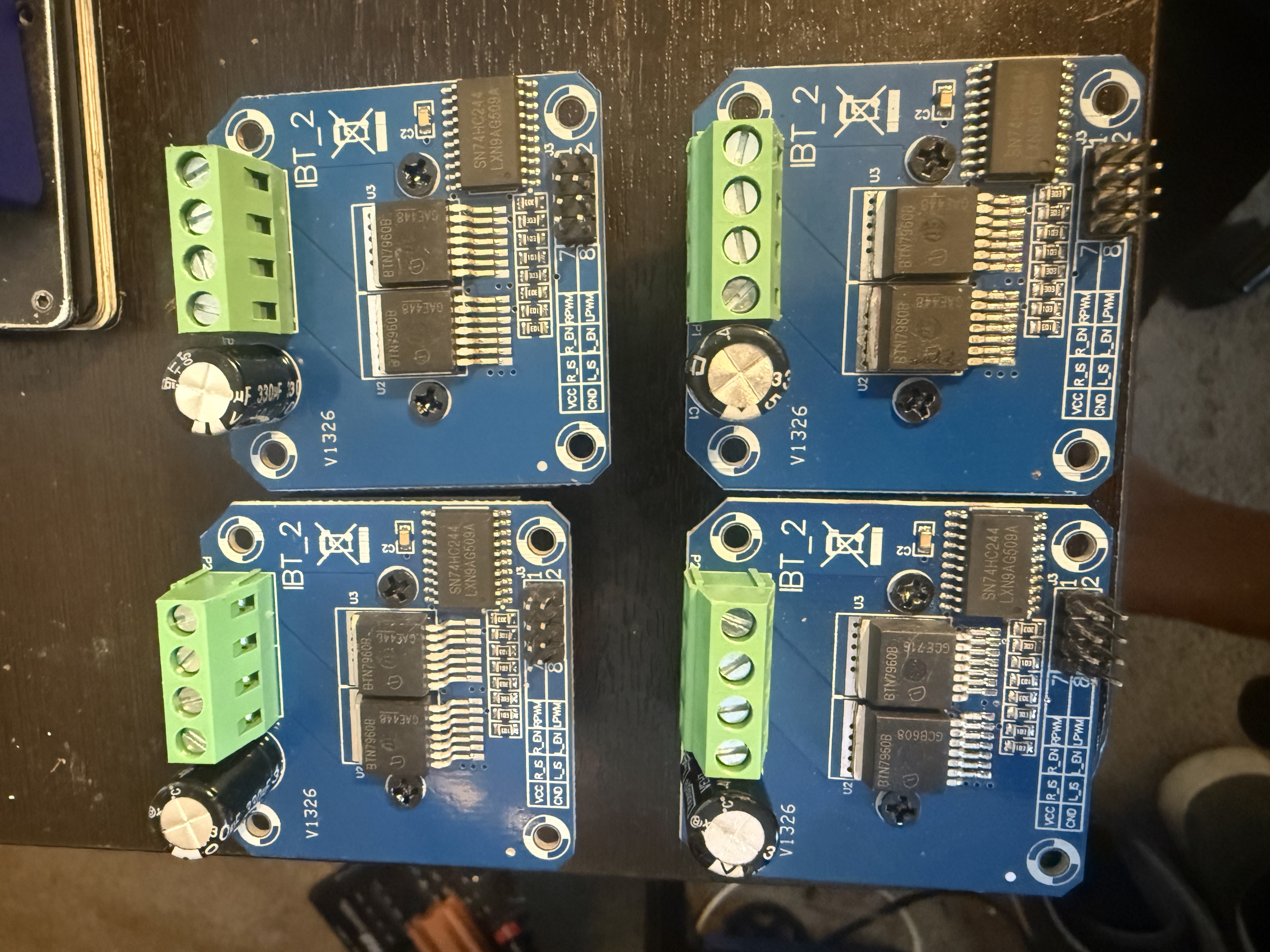
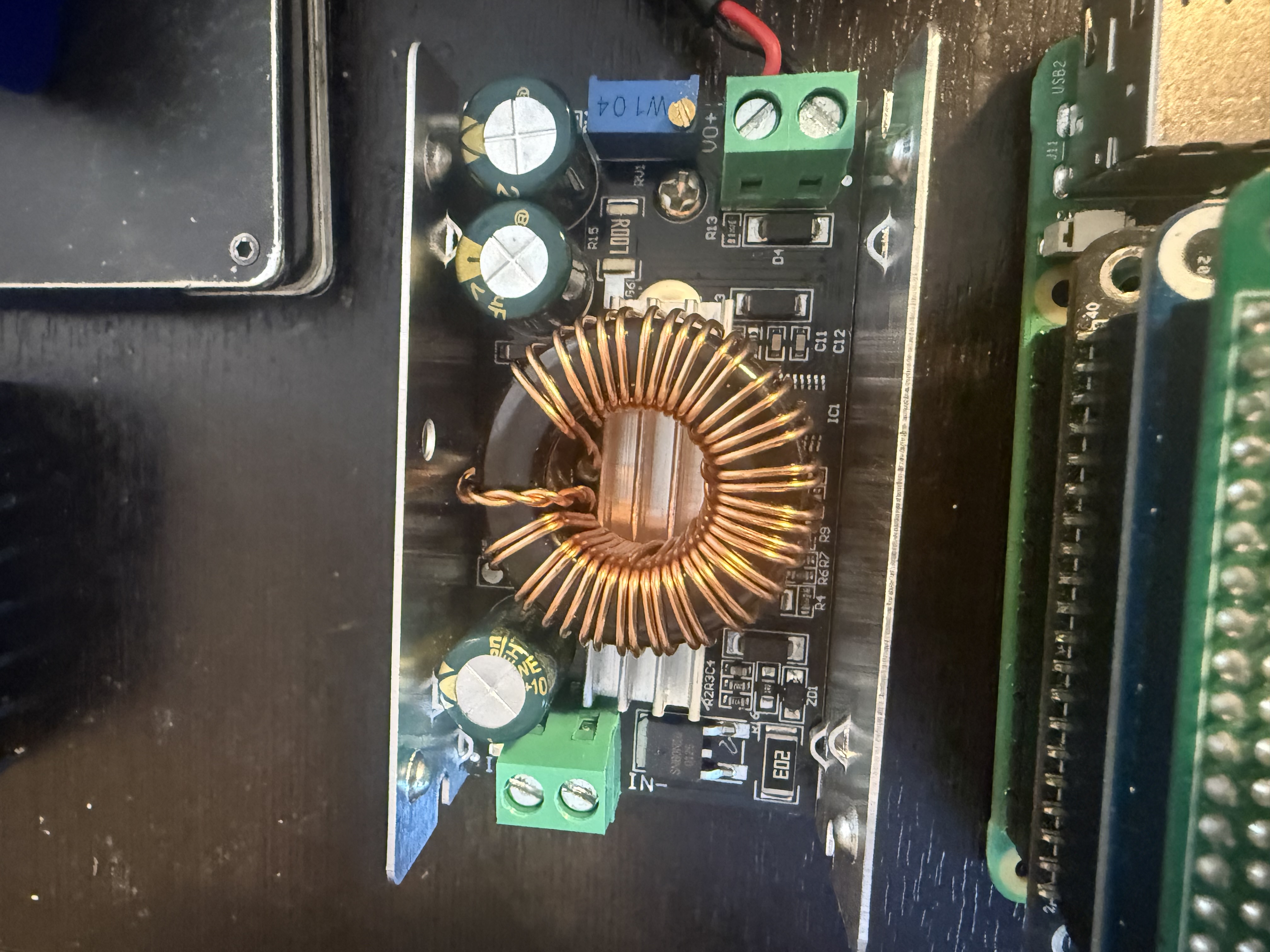
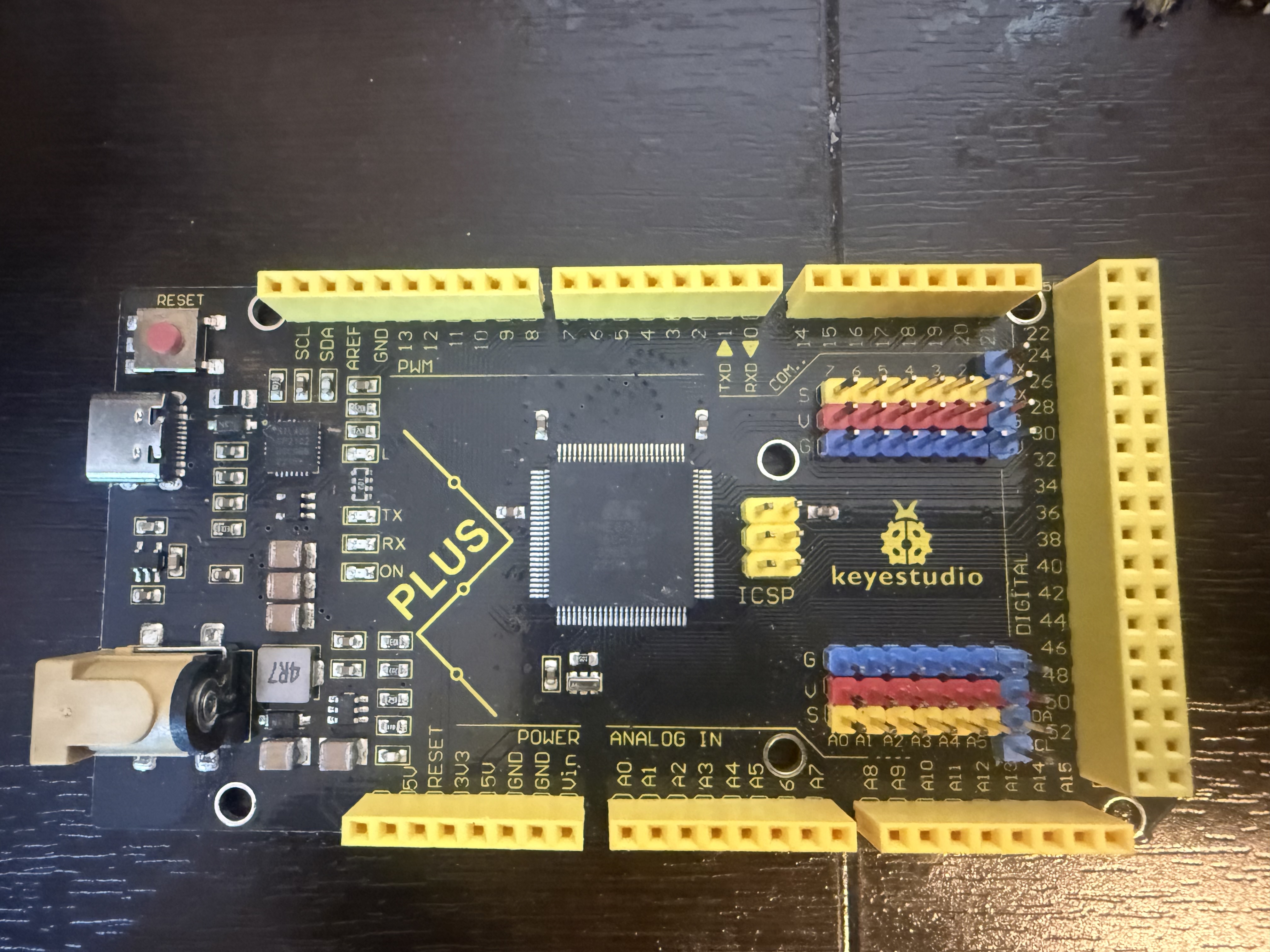
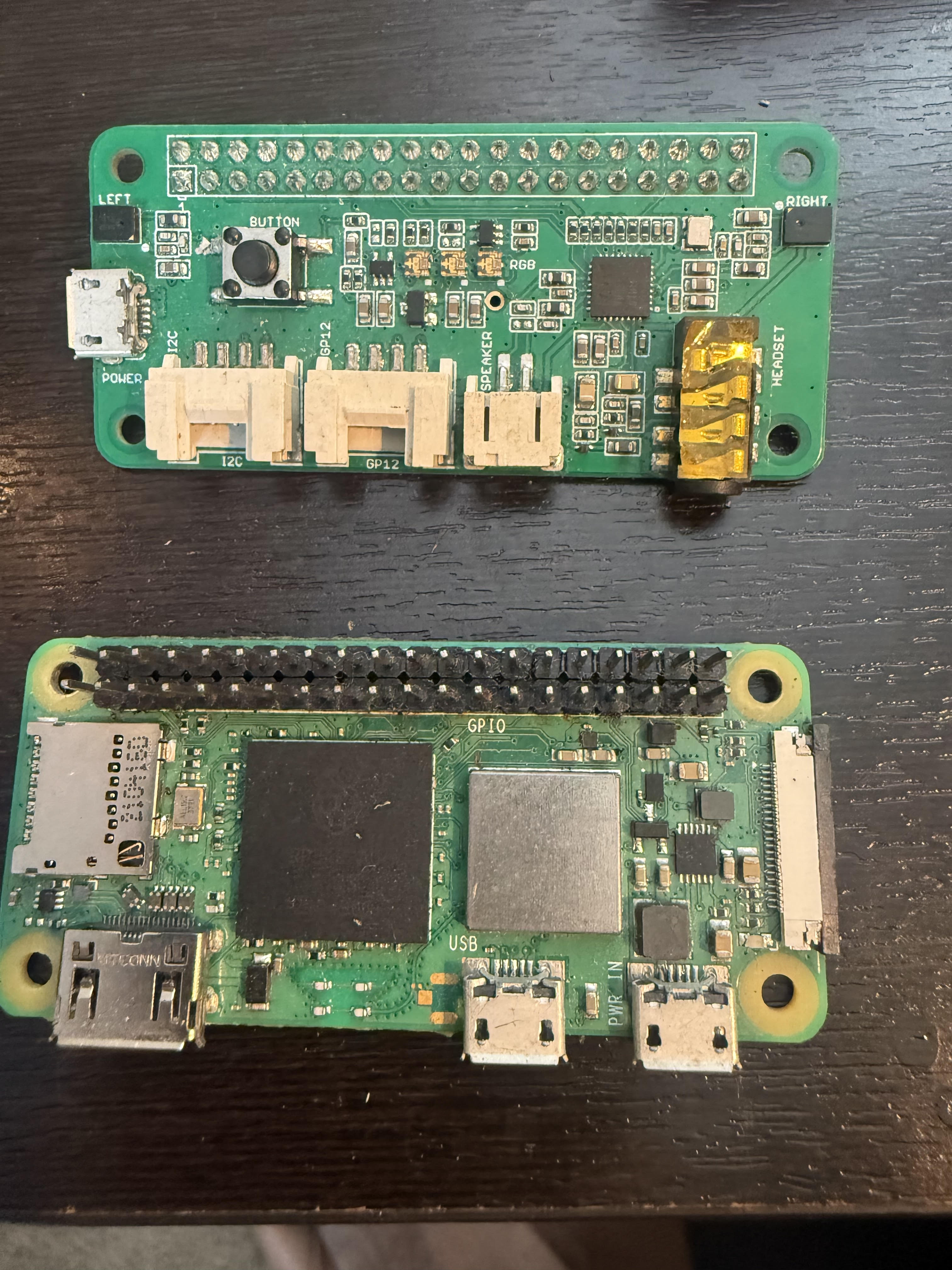
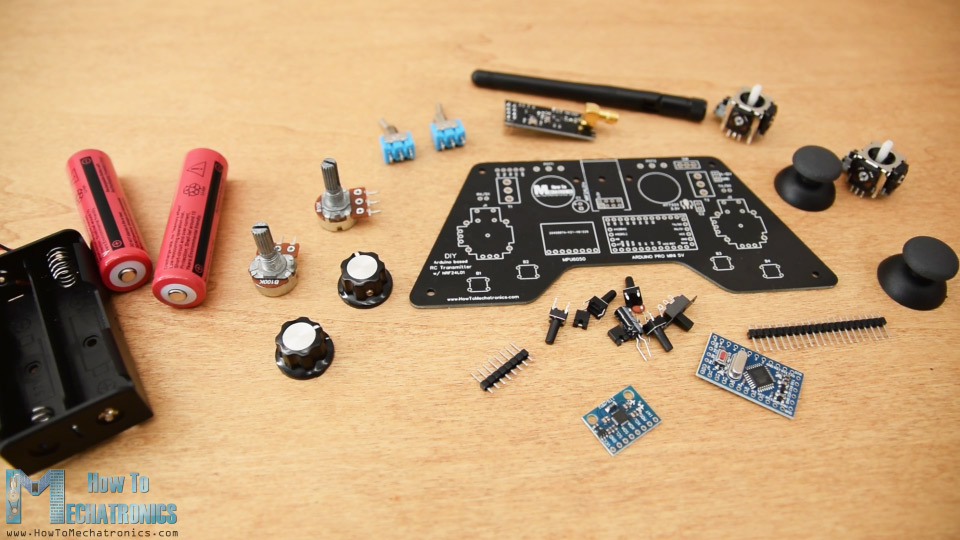
These photos match the major components listed in the BOM.


| Category | Qty | Part | Purpose |
|---|---|---|---|
| Controller | 1 | Raspberry Pi 5 with Wi-Fi | Main robot computer; Wi-Fi for SSH, setup, and local API/touchscreen service. |
| Controller | 1 optional | RP5 relay HAT | Only usable if verified stacking/clearance does not conflict with the Pico Voice I2C wiring. |
| Controller | 1 | Pico Voice board / voice hardware | Voice path on RP5 I2C-1: SDA GPIO2/P3 and SCL GPIO3/P5. |
| Controller | 1 | Powered USB hub | Active expansion path for claws, LoRa bridge, touchscreen, and service devices. |
| Controller | 1 | USB PWM/GPIO controller | Drives IBT-2 PWM/enables and RGB driver logic so motor wiring stays off the Pico Voice I2C bus. |
| Interface | 1 | 7 inch USB touchscreen | Local dashboard and control display. |
| Drive | 4 | XD-60GA775-style 24V gear motor | Direct-drive wheel motors; one motor per wheel. |
| Drive | 4 | IBT-2 / BTS7960 motor driver | One H-bridge per motor. |
| Power | 2 | 12V LiFePO4 battery | 24V-class series pack. |
| Power | 1 | Main fuse | Battery positive protection. |
| Power | 1 | Emergency stop switch | Kill 24V load bus. |
| Power | 1 | 24V-to-5V 5A buck converter | Raspberry Pi power. |
| Power | 1 | 24V-to-5V/6V servo buck | Two-claw servo power. |
| Power | 1 | Common ground block | Shared logic ground. |
| Lighting | 9 | RGB LED star module | Underbody ground-effect lights from the supplied photo reference; clear sealed pods are required before splash testing. |
| Lighting | 1 | Fused lighting branch | Separate protected feed from the switched 24V bus. |
| Lighting | 1 | LED buck or constant-current supply | Match the LED board voltage/current before connecting modules. |
| Lighting | 1 | RGB LED driver / MOSFET board | PWM driver stage for LED channels; do not power LEDs from Pi GPIO. |
| Lighting | 2 | Side-mounted up/down ground-effect tilt servos | Raises/lowers the left and right ground-effect light rails; power from servo buck, signal from spare claw-board channels. |
| Claws | 2 | Keyestudio PLUS-style controller board | One USB servo controller per claw. |
| Claws | 12 | Servo motors | Six servos per claw board. |
| Claws | 2 | USB cables | RP5 to left and right claw boards. |
| Radio | 1 | DX-LR30 / DX-PJ26 / SX1262 LoRa module | Long-range control/status. |
| Radio | 1 | STM32F103C8Tx radio bridge | Radio bridge MCU. |
| Remote | 1 | Raspberry Pi Zero 2 W with Wi-Fi | Remote transmitter computer; Wi-Fi for SSH, Picovoice setup, and LAN command tests. |
| Remote | 1 | Pico Voice board | Voice input, buttons, speaker/headset path. |
| Remote | 1 | LoRa transmitter module or LoRa USB bridge | Sends commands to GAR-BOT. |
| Remote | 2 | Joystick modules with thumb caps | Drive/turn and claw/manual control inputs. |
| Remote | 2 | 10k potentiometers with knobs | Trim or speed/servo limit controls. |
| Remote | 2 | Small toggle or slide switches | Mode/arm/lighting control inputs. |
| Remote | 4 | Momentary command buttons | Stop, talk, mode, and status inputs. |
| Remote | 1 | 2x18650 protected battery holder | Remote transmitter battery pack. |
| Remote | 1 | Protected 5V regulator / USB-C boost-charger module | Regulated Pi Zero 2 W power from the 18650 pack. |
| Remote | 1 | SMA antenna bulkhead and LoRa antenna | External antenna path for the LoRa transmitter. |
| Remote | As needed | Pin headers, JST leads, switch caps, and panel hardware | Mounts and connects the transmitter controls. |
| Remote | 0 | Arduino Pro Mini | Removed from GAR-BOT remote design. |
| Remote | 0 | nRF24L01+ module | Removed; LoRa and Wi-Fi are the active radio paths. |
| Remote | 1 | RC-style handheld transmitter enclosure | Holds RP Zero 2 W, Pico Voice, controls, battery holder, and LoRa. |
All printed parts are in `downloads/GAR-BOT_STL_Files.zip` and pass the current STL mesh audit.
| Stage | Qty | Part Numbers | Printable Files / Modules | Purpose |
|---|---|---|---|---|
| Frame | 1 each | #8-#15 | side rails, crossmembers, skid plate, battery tray, electronics deck, top shoulder claw bridge | Main chassis and top-shoulder claw structure. |
| Bottom armor | 1 | #47 | one_piece_bottom_skid_plate.stl | Large one-piece underbody skid with wheel reliefs, drain slots, runners, center keel, and six heat-insert mounting pockets. |
| Protective body | 1 each | #16-#18 | electronics bay, gasketed lid, cable gland panel | Protective RP5 electronics compartment with internal RP5, buck converter, and Pico Voice standoffs; not water resistant until gasketed, gland-sealed, and tested. |
| Large cover | 1 | #46 | one_piece_body_cover.stl | One-piece upper cover for the chassis deck, electronics area, touchscreen window, and shoulder-claw reliefs. |
| Drive/power | 4 / 1-2 | #19-#22 | IBT-2 driver covers, buck converter cover, motor splash shields, drip-loop clips | Protects direct-drive motors, drivers, power conversion, and wire exits. |
| Touchscreen | 1 each | #23-#27 | touchscreen bezel, rain hood, left/right uprights, top bar | Mounts and protects the 7 inch USB touchscreen. |
| Two claws | 2 sets | #28-#38 | base mounts, shoulder pivots, servo pockets, wrist cradles, palms, fingers, links, gear guards, wire covers, controller covers | Left and right claw assemblies mounted on top of the shoulders. |
| Remote | 1 each | #39-#42 | remote case front/back, LoRa antenna bulkhead, LoRa bulkhead guard | RP Zero 2 W + Pico Voice remote transmitter enclosure. |
| Branding | 1-2 each | #43-#45 | K2Aley lid badge, K2Aley side badge, water warning badge | Branding and dry-use/sealing warning labels. |